一、开题答辩题目:尾坐式无人机建模与模态转换稳定控制研究
二、开题答辩人:周海军
三、开题答辩时间:2023年6月16日 下午14:30
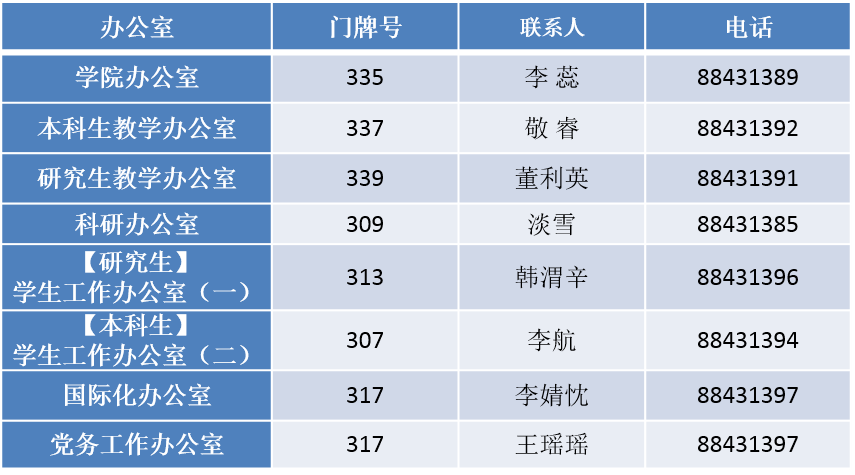
四、开题答辩地点:bwin必赢会议室341
五、开题内容简介:
针对尾坐式无人机模态转换过程的稳定控制问题,研究尾坐式无人机高可信度建模方法以及模态转换过程的控制策略、控制方法、控制分配等关键技术,解决尾坐式无人机高可信度建模以及模态转换阶段多变量强耦合非线性控制律设计问题,最终实现模态转换过程中尾坐式无人机模态转换阶段姿态与轨迹一体化稳定与控制,并基于小型尾座式垂直起降固定翼无人机平台开展上述关键技术的验证与确认。
六、开题答辩人简介
周海军,男,航空工业自控所高级工程师,我院2021级在读博士研究生,主要研究方向为飞行器先进控制技术。